

商铺名称:北京秦氏管道焊机有限公司
联系人:秦军(先生)
联系手机:
固定电话:
企业邮箱:272315659@qq.com
联系地址:北京市昌平区沙河镇昌平路99号沙河科技园M座103
邮编:100878
联系我时,请说是在焊材网上看到的,谢谢!
管道全位置自动焊机,北京秦氏管道科技有限公司销售全位置管道焊机15201133137
公司主要生产经营全位置管道自动焊机,包括:热力管道焊机,供水管道焊机,石油管道自动焊机,全自动天然气管道焊机,化工管道焊机, 我公司为实现野外管道焊接的效率、质量减轻操作人员的劳动强度,针对于长输管道的焊接而设计的管道对接自动焊机。 长输管道是现代物业输送的重要手段,管道焊接时长输管道铺设的关键。我国的许多工程有长距离、大管径、大壁厚等施工特点,单靠国内内的焊条电弧焊,工人的劳动强度大,生产效率低,施工进程十分的缓慢。且我国的管道焊接工人短缺,人工工资较高 ,管道自动焊接已在我国开始应用。可根据客户的要求设计各种管道焊接设备和管道坡口设备、制造安装。提供免费培训技术咨询、成套服务。我公司产品广泛用于热力管道、石油管道、石化管道、化工管、城市水管管道、造船电力管道等.

|
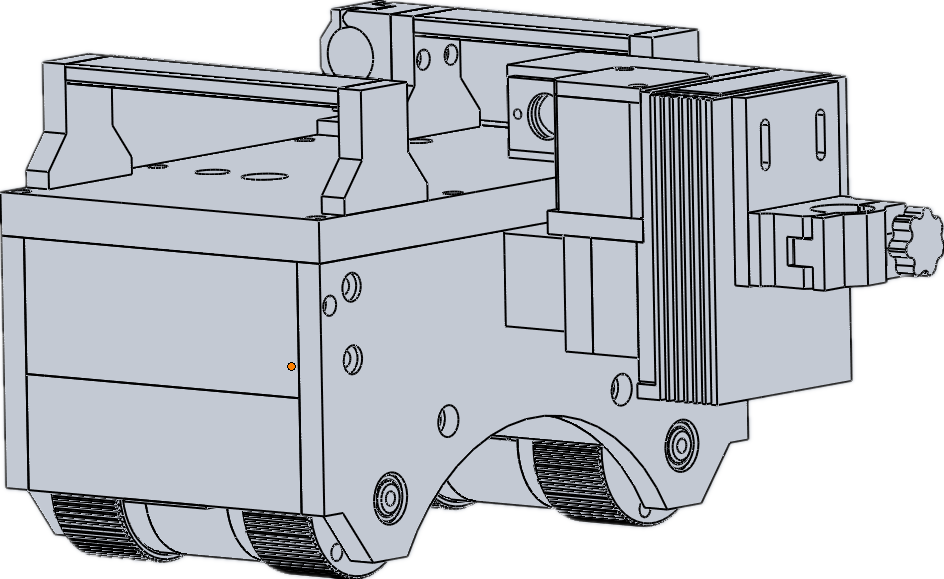
GD130-TX管道全位置自动焊基础 一.前言 在管道工程施工中,焊接质量是保证工程质量最重要的环节之一,焊接效率也直接影响着施工进度,即工程的质量和进度在极大程度上取决于焊接质量和焊接进度。随着输油输气管道向大口径、长距离、高强度、高压力的不断发展,焊接的难度越来越大,对焊接质量的要求也越来越高。靠手工电弧焊和药芯焊丝半自动焊是很难满足上述要求的。而管道全位置自动焊,则是能够满足要求的一项全新的焊接工艺。管道全位置自动焊,是管子固定不动,焊接小车绕管子转动来实现管子全位置(平、立、仰)的焊接。焊接过程由机械和微机完成,受人为的影响因素较小,所以管道全位置自动焊具有焊缝质量好、焊接效率高等优点。管道自动焊并不是简单地用机器代替焊工操作。为保证机械化焊接作业的高质量和高效率,自动焊需要大量、细致的辅助工作。这些辅助工作的主要目的是保证自动焊作业过程顺畅、机械化焊接质量可靠,主要包括:勘察设计时确定适合于自动焊作业的管道纵向坡度,选择较小的冷弯管角度,尽量减少热煨弯管数量等;钢管制造时减小管口椭圆度、管端平直度和周长等制造参数的误差范围;现场加工坡口的管端平直度、尺寸一致性、坡口面光洁度等加工质量的保证;自动焊机组人员的操作技能和相互间配合的熟练度,自动焊工作站之间的配合与衔接;对自动焊焊缝金属无损检测方法、检测标准的统一认识,无损检测环节对自动焊系统误差而产生缺欠的及时反馈与纠正;自动焊操作工、无损检测、监理、质量监督、业主等技术和管理人员相关专业知识的培训与学习等。管道自动焊技术在我国石油天然气长输管道建设中的应用范围不断增加,但其应用率与国外相比仍然是比较低的,应用的效率、质量、成本等综合效益尚未达到其应有的水平。自动焊技术应用过程中发现的种种问题,表面看起来与设备、使用者、焊接材料及管理规定等有关,实质是没有从根本上理解自动焊对其相关辅助工作要求的严格性。因此,应将自动焊作业及其上下游工作作为一个技术体系对待,并在这一技术体系内追求各专业的技术进步及相关管理人员专业知识的提升。随着自动控制技术和电弧跟踪技术的不断完善,熟练掌握自动焊操作技能的员工队伍不断扩大,管道自动焊技术会越来越适应石油天然气长输管道的现场焊接需求,其焊接质量和经济效益都将得到提高,并逐渐成为管道建设的主要现场焊接方式。 二. GD130-TX管道全位置自动焊接系统构成及主要技术指标 GD130-TX管道全位置自动焊接系统由焊接小车、送丝装置、遥控器、焊接电源、保护气体供给系统等组成。 GD130-TX管道全位置自动焊机的主要性能指标如下: (1)焊接速度0-2400mm/min连续可调。 (2)送丝速度0-16m/min连续可调。 (3)电弧电压14-27V连续可调。 (4)摆动宽度最大40mm。 (5)摆动轨迹任意设定。 (6)单摆时间最小250ms。 (7)焊接方式熔化极气体保护源(GMAW)。 (8)焊丝直径0.8-1.6mm。 (9)保护气体C02+Ar。 (10)送气、滞后断气时间任意设定。 (11)适用焊接电源硅整流或逆变电源(350A以上),具有焊接电源远控。 (12)适用管径130mm以上。 (三)行走结构 (1)焊接小车。焊接小车由行走机构、送丝机构、焊枪姿态调整机构等组成。
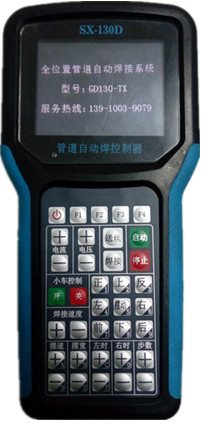
行走小车 遥控器 (四)自动控制系统 GD130-TX管道全位置自动焊机控制系统采用了数字信号处理器(DSP)为核心的先进运动控制技术,运算精度高,可对四个控制电动机实现全数字化伺服算法控制。控制系统硬件结构:
(2)I/O通道。I/O通道主要作用是为手持盒和焊接电源控制提供一个信号的输入、输出通道。 (3)手持遥控器。手持遥控器设有电流电压调节,焊接方向功能键、焊道选择功能键、焊枪位置调节键、焊车行走控制健、送丝状态控制键、焊接过程控制键、焊接过程复位键以及焊枪增幅调节键。自动焊机的控制全部通过手持操作盒来完成。 (4)焊接电源的控制。为满足自动焊接的需要,是将焊接电源送出的8位二进制数字转化为模拟电压信号或线性分段递变电阻值,以便由焊接程序自动控制电弧电压。 (5)伺服电动机的闭环控制。运动控制器在运行时自动闭合电动机的数字伺服环,伺服环的功能是通过反馈产生使电动机的实际位置逼近所要求位置的输出。 |
三、GD130-TX管道全位置自动焊接系统特点
GD130-TX管道全位置自动焊工艺性能好、对管口适用性强的特点,焊接根焊焊道。利用管道全位置自动焊,焊接效率高的特点,焊接填充和盖帽焊道。此工艺具有如下特点:
1.STT气体保护半自动焊工艺特点
(1)引弧容易。
(2)电弧燃烧稳定。
(3)焊接烟尘和噪音小。
(4)飞溅极小。
(5)内焊道成形美观。
(6)操作容易。
(7)焊接成本较低。
(8)焊接效率较高(与手工电弧焊和钨极氩弧焊相比)。
(9)抗风能力差(与手工电弧焊相比)。
(10)特别适用管口根焊道的焊接,也适用于其他焊道的焊接。
2.管道全位置自动焊接设备的工艺特点
(1)焊接工艺参数输入器(牛顿信息包),可储存多组焊接工艺参数,以适用多台焊机和不同规格钢管的需要。
(2)本焊焊接设备大部分焊接工艺参数由焊接工艺参数输人器输入,焊工不能对其进行修改(焊接工艺参数由焊接技术人员输入),确保了焊接工艺参数的准确性。
(3)焊接电弧燃烧比较稳定。
(4)焊接生产率高,与手工电弧焊相比可提高2~5倍。
(5)焊缝成形美观,内部质量好。
(6)可采用CO2气体或混合气体(Ar+CO2)作为保护介质。
(7)适用管径φ≥150mm,适用管壁厚度δ≥5mm。管径越大、壁厚越厚,其经济效益越好。
四、GD130-TX管道全位置自动焊接系统工艺原理
1.STT焊接工艺原理
STT焊接电源是一种以表面张力为熔滴主要过渡力的CO2气体保护半自动焊。
STT焊接电源具有波形控制功能,根据熔滴的不同过渡过程。控制焊接电流和电弧电压的波形。即焊接电源能自动调节焊接电流和电弧电压达到电弧所需的瞬时热量。确保焊接电弧的稳定燃烧和有效地控制焊缝成形。
2.管道全位置自动焊工作原理
GD130-TX管道全位置自动焊机,是专门用于管道焊接的自动焊设备。它使用实芯焊丝(φ0.8~φ1.0),采用的保护气体为c02或混合气体(CO2+Ar)。焊接方向为下向焊。送丝速度、焊接速度和摆动频率等焊接工艺参数由焊接工艺参数输入器输入,焊工不能对其进行修改(或只能对某种参数进行一定范围的修改),确保每台焊机和每道焊口焊接工艺参数的一致性。从而保证了各道焊口的焊接质量的均匀性,达到保证焊接质量的目的。
此焊接设备适用窄间隙坡口形式的焊接。窄间隙坡口具有如下优点:(1)焊接接头受热范围小,焊接热影响区小。(2)焊接变形和应力小。(3)焊缝的组织和性能好。(4)节省焊接材料。(5)焊接效率高。
此焊接设备适用于各种坡口形式的焊接。用于V形坡口的焊接时,除焊接效率较窄间隙坡口低外(仍可达到手工电焊的2~5倍),其他焊接优点仍较突出。
五、操作要点
1.焊接性试验及焊接工艺评定
管道全位置自动焊在工程施焊前,应进行焊接性试验。当钢管的材质、规格、坡口型式、焊丝的牌号、焊丝的规格和保护气体种类等发生变化时,均应进行焊接性试验,试验步骤如下:
(1)根据标准要求、理论计算和以前的经验,初步确定焊接工艺参数范围。
(2)在确定的焊接工艺参数范围内,设定几组不同的焊接工艺数进行焊接工艺性试验。对焊接后的试件进行外观检查和无损探伤,缩小焊接工艺参数的范围。
(3)在拟定的焊接工艺参数范围内,重新进行试验,确定一组最佳的焊接工艺参数。
(4)用确定的焊接工艺参数进行多道焊口(一般不少于5道)做模拟施工环境的焊接试验。并对试件进行外观检查和无损探伤。确定良好的焊接质量是否稳定。若不稳定应调整参数重新试焊,直至焊接质量达到规定的稳定状态。
(5)焊缝的外观质量和无损探伤质量良好稳定后,应抽一个(或2个)管口进行力学性能试验。试验的各项指标均合格后,方可应用于工程焊接。
2.焊工考试
焊工在从事新的焊接项目前应进行考试。考试项目包括与考试项目相关的焊接基础理论知识和试件的操作技能。应对试件进行外观检查和无损探伤,各项指标均合格后发给焊工合格证。
3.焊前准备
自动化程度越高的焊接,对焊前准备工作要求就越严格。管道全位置自动焊焊前准备包括如下几个方面:
(1)焊接设备的调试及各工艺参数的确定:
在焊接前应对焊接设备进行调试,确保设备各部分运转正常,并按焊接工艺评定编制的焊接作业指导书的要求输入各焊接工艺参数。
(2)管口的测量和修整:
严格按焊接作业书的要求,对坡口角度、钝边厚度及管口的圆度、垂直度和平面度等进行测量,不符合要求的必须进行修整,直至达到要求,否则不得施焊。
(3)管口清理:
焊接前必须对坡口及坡口内外两侧进行清理。坡口两侧100mm范围内应无污物,坡口及坡口两侧10mm范围内应见金属光泽。
(4)防风准备:
由于本管道自动焊是气体保护焊,焊接时风速不得大于2m/s。在自然环境下达到此要求的天气很少,所以在野外施工必须采取有效的防风措施。我们采用的是随焊接作业车起吊的专用防风蓬,该防风篷还可防雨,既确保了焊接质量,又提高了工效。
4.焊前预热
当焊接钢管的强度较高、钢管厚度较大、焊接环境温度较低时,在焊接前应对钢管进行预热。预热参数如表1:
全位置管道焊机在管道向下立焊的特点、焊接工艺及操作方法
1. 管道焊机在向下立焊的特点
(1)向下立焊时,焊条自上而下运条,由于焊缝多处于立仰焊位置,熔池金属的流动速度明显加快,这就要求提高焊接速度,同时也要求熔滴向熔池的过渡速度随之加快,因而要求选用较大的焊接电流,以增加电弧吹力和电磁收缩力,减少熔滴表面的张力,加快熔滴过渡,增大熔深,提高填充金属的覆盖性能。
(2)为防止熔渣过快向前流动造成夹渣,或因为熔渣保护不良,影响焊缝质量和成形,要求使用短渣焊条,因此向下立焊要求使用专用的立向下焊条。
(3)由于向下立焊时焊接速度快,所以焊接热输入少,焊接接头具有良好的力学性能,变形也大大减少。
2. 全位置管道焊机在向下立焊焊接工艺
(1)焊前准备
为降低焊缝中氢的含量,焊前必须对焊接区的铁锈、油污、水等杂质进行严格的清理,以避免引起焊缝气孔。①采用机械清理法、化学清理法及机械化学综合清理法。②清理要求焊接接头露出金属光泽(焊缝两侧各20mm范围)。如果是化学清理还要注意用清水冲洗,并经干燥处理。
(2)装配定位焊
因向下立焊时对装配要求很高,应尽可能避免错边,最好采用对口器对口。如果由于焊接母材而存在错边且没法消除时,其错边位置绝不允许放在管子的6点位置,最好放在3点或9点位置。管子定位焊缝长及数量根据管径的不同而不同。管径>100mm,定位不应少于3处;管径≤100mm时,定位焊缝长度在5~10mm;管径>100mm时,定位焊缝长度应≥15mm。定位焊位置以放在2点、6点和10点为宜(考试时是不允许在6点位置有定位焊缝的)。
(3)焊接材料 向下立焊焊接材料的选择应考虑两方面的因素:一是母材的材质,二是管道输送的介质。
由于输油气管道多为结构钢材料,应该按等强原则来选择焊条,因此要求焊接材料的强度级别与母材基本相同。如果管道是属于输气管线,则应选用低氢型向下立焊焊条,因为输气管线对焊接接头的性能要求高,而低氢型焊条能很好地减少接头中的氢含量,提高接头性能。如果是输油、水管道,则可以选用纤维素型向下立焊焊条。
碱性焊条在焊前要进行烘干处理,其烘干温度是350~400℃,保温时间是1~2h。烘干时焊条必须分层平放,ф3.2mm的焊条最多不能超过5层,ф4mm的焊条最多不能超过3层,且重复烘干次数不能超过3次,并且必须随用随取,焊接时所用焊条必须放在保温桶中。
(4)焊接电源及极性应用 碱性焊条必须选择直流焊接电源。为提高焊接电弧燃烧的稳定性、减少飞溅和气孔的产生,必须采用直流反极性接法。
(5)坡口形状及尺寸 为了便于加工,易采用V形坡口,形状尺寸视具体情况而定。
(6)焊接参数 向下立焊焊接速度快,焊条不宜采用较大的横向摆动,最好使用直线运条,并遵循多层多道焊原则(见下表)。其焊接的层数可按下式估算:
N=δ/md
式中 n──焊接层数;
δ──焊件厚度;
m──经验系数(m=0.8~1)。
(7)其他工艺措施 根据管道材料及工作环境的不同可采取以下工艺措施来提高接头质量。①焊前预热。焊前预热能有效降低焊后冷却速度,减少淬硬程度,防止裂纹产生,并可以减少热影响区因温差而造成的焊接应力。预热温度因材而异,预热宽度每侧不得少于板厚的
3. 管道向下立焊焊接操作
(1)底道焊
焊接分两个半圈完成,先焊右半圈,后焊左半圈。右半圈从12点前5~10mm处起焊,在坡口表面引燃电弧,然后将电弧引到起焊位置,待钝边熔透后即沿焊缝向下施焊。在焊接过程中要注意观察熔池的大小及击穿情况,采用短弧焊接,及时调整焊条角度,焊后应彻底清除熔渣,特别是焊缝与坡口的接合线上更要严格清理。
(2)填充层焊道 可根据具体情况采用单道焊或多道焊,其操作与底道基本相同。如果采用多道焊则要注意相邻焊道间的重叠量(重叠1/3~2/3),以避免焊道间产生沟槽,而引起夹渣。同时,填充层不能破坏坡口线,当焊至距管表面1~1.5mm时即中止填充层焊接。
(3)盖面焊道 盖面层焊接时,焊接电流应比中间层少5~10A,为了便于控制焊缝宽度,焊条可以稍做摆动。
本文摘自:http://www.guandaohanji.com/jishu/2017/0610/89.html


 器
器








