

�������ƣ����������Զ����豸����˾
��ϵ�ˣ���������������
��ϵ�ֻ���
�̶��绰��
��ҵ���䣺2382119668@qq.com
��ϵ��ַ����������ɳ��魺������뻨һ������201��
�ʱࣺ
��ϵ��ʱ����˵���ں������Ͽ����ģ�лл��






| ���� (Kg) | 0.291 Kg |
| ��Ʒ�ߴ� (W x L X H) | δ�ṩ |
| ��װ�ߴ� | 12.90 x 14.80 x 5.10 |
| ��װ�ߴ絥λ�IJ��� | CM |
| ������λ | 1 �� |
| ��װ���� | 1 |
| ������Ʒ��Ϣ | |
| EAN | 4025515070979 |
| UPC | 662643118063 |
| ��Ʒ���� | 85389091 |
| LKZ_FDB/ CatalogID | ST73 |
| ��Ʒ�� | 4031 |
| ԭ���� | �¹� |
| Compliance with the substance restrictions according to RoHS directive | RoHS �Ϲ濪ʼ����: 2008.03.31 |
|
�����ӹ�ҵ�Զ������������ź������ |
���������Զ����豸����˾ |
|
�� ϵ �ˣ� |
�� �� |
|
�� �� �� |
0 2 0- 3 9 0 0 8 7 5 9 |
|
�� �� �� |
1 7 7 2 8 1 9 8 3 3 1���ţ� |
|
�� �棺 |
0 2 0- 3 9 0 0 8 7 5 9 |
|
���� QQ : |
2 3 8 2 1 1 9 6 6 8 |
|
��˾��ַ�� |
��������ɳ��魺������뻨1������ |
���������Զ����豸����˾����������Ϊ�����������£���ѧ��չ�������룬�����ڹ�ҵ�Զ�����������IJ�Ʒ��������������ϵͳ���ɣ�ӵ�зḻ���Զ�����Ʒ��Ӧ�ú�ʵ�������Լ��ۺ�ļ���������������PLC����ϵͳ����������Ӧ�ã��ŷ�����ϵͳ�����ز�Ʒ�������˻����漰��������Ӧ��Ϊ��˾�ļ����س���������¹��������Զ���������������չ���˳��ڽ��ܺ������ڼ佨�������õ��Э����ϵ���¹������ӿ������ϵ�ҵ�����ƣ��������ƣ���ҵ�Ļ����ƣ�������ɳ��ó�����ڵĹ�˾����ҵ�����Ҹ�����ص�˰���Ż����ߣ�����˾��ŵ���ڱ�֤����ͻ��IJ�ƷΪ������ȫ�£�ԭװ����Ʒǰ���£���Ʒ�۸�Ա�ҵ��ͬ�У��������Զ�������ϵ���Żݷ��ȴ�5%��13%����������˾��Ʒ�ӹ������ڿ�ʼ�������������ʱ�һ�꣬�����������Ʒ�����������⣨����Ϊ������Ѹ���ά�ޣ�����ȡ�κη��á�
��ӭ������ѯ
�����������ƶ������ǻ۹����Ľ��� ȷ����ҵ4.0ʱ�������յ���
���ݳ���������ԭװģ����ģ��
��Ҫ���Ʋ�Ʒ�����ӣ�S7-200CN��S7-200��Smart200��S7-300��S7-400��S7-1200����������6FC��6SN��S120��V10��V20��V60��V80��G110��G120��6RA���ŷ����ر�����NCU��MMϵ�б�Ƶ����
������S7-1200 PLC�ڵ�ǰ���г������Ź㷺��Ӧ�ã���Ϊ�����Ƶ����ͬʹ�õ�PLC������������MM440 ��Ƶ����USSͨ��һֱ���г������ŷdz��㷺��Ӧ�á����Ľ���Ҫ�������ʹ��USSͨ��Э����ʵ��S7-1200��MM440��Ƶ����ͨ�š�
1. USSͨ�Ž���
1.1. USSЭ���ص�
USS (Universal Serial Interface, ��ͨ�ô���ͨ�Žӿ�) ��������רΪ����װ�ÿ�����ͨ��Э�顣USS Э��Ļ����ص����£�
? ֧�ֶ��ͨ�ţ��������Ӧ���� RS 485 �������ϣ�
? ���õ���վ�ġ������ӡ����ʻ���
? ÿ���������������� 32 ���ڵ㣨��� 31 ����վ��
? �ɿ��ı��ĸ�ʽ��ʹ���ݴ�������Ч
? ����ʵ�֣��ɱ��ϵ�
USS �Ĺ��������ǣ�ͨ����������վ����USS ��վ����ѭ����ѯ������վ����վ�����յ���ָ������Ƿ��Լ������Ӧ����վ��Զ���������������ݡ���վ��������������ʱӦ��
-- ���յ�����վ����û�д�����
-- ����վ�ڽ��յ���վ�����б�Ѱַ
�������������㣬������վ�������ǹ㲥���ģ���վ�������κ���Ӧ��������վ��˵����վ�����ڽ��յ���վ����֮���һ��ʱ���ڷ�����Ӧ��������վ����Ϊ������
USS ���ַ������ʽ���� UART �淶����ʹ�ô����첽���䷽ʽ��USS �ڴ������������ϵ��ַ�����֡Ϊ 11 λ���ȣ����1��ʾ��

��1��USS�ַ�֡
USS Э��ı��ļ��ɿ�����Ч��������һ�������ַ���ɣ�Э���ж��������ǵ���
�����ܣ���2��ʾ��

��2��USS���Ľṹ
ÿС�����һ���ַ����ֽڣ������У�
STX�� ��ʼ�ַ������� 02 h
LGE�� ���ij���
ADR����վ��ַ����������
BCC�� BCC ���
���������� PKW ���� PZD ����ɣ����3��ʾ��

��3��USS��������
PKW�� ���������ڶ�д����ֵ�������������������ı��������ĺͱ�������ĸı� �����У�
PZD�� ��������������վ�ʹ�վ֮�䴫�ݿ��ƺ������ݡ����Ʋ������趨�õĹ̶���ʽ��������վ֮���Ӧ�������磺
���ݴ�����������ͺ�����װ�õIJ�ͬ��PKW �� PZD �������ݳ��ȶ����ǹ̶��ģ����ǿ������ı�����Ӧ�������Ҫ�����ǣ��������������ͨ�ŵ��Զ���������ʱ�������ϵ����нڵ㶼Ҫ����ͬ���趨�������������������������в�������ı䡣
ע�⣺
���ڲ�ͬ������װ�ú���ģʽ��PKW �� PZD �ij��ȿ���һ�����ɶ��塣 һ��ȷ���Ͳ���������������ı� ��
PKW ���Է������ж� USS ͨ�ſ��ŵIJ������� PZD ���ܷ����ض��Ŀ��ƺ������ݣ�
PKW ����������װ��������Ϊ��̨����������� PZD ��ʵʱ��Ҫ�� PKW �á�
1.2. S7-1200 USSͨ�ż��
CM 1241 RS485 ģ��ͨ�� RS485 �˿���MM440����ͨ�š� ��ʹ�� USS �����MM440�Ͷ�/дMM440�������ÿ��ṩ 1 �� FB �� 3 �� FC ��֧�� USS Э�顣 ÿ�� CM1241 RS485 ͨ��ģ�����֧�� 16 ��MM440�����ӵ�һ�� CM 1241 RS485 ������MM440����� 16 ������ͬһ USS �����һ���֡����ӵ���һ CM 1241 RS485 ������MM440����һ USS �����һ���֡� ��Ϊ S7-1200���֧������ CM 1241 RS485 �豸�������û����ɽ������� USS ���磬ÿ��������� 16 ��MM440���ܹ�֧�� 48 �� USS MM440���� USS ����ʹ�ø���Ψһ�����ݿ���й�����ʹ������ CM 1241 RS485 �豸�������� USS������Ҫ�������ݿ飩�� ͬһUSS ������ص�����ָ����빲�������ݿ顣 ��������ڿ�������������MM440�� USS_DRV��USS_PORT��USS_RPM ��USS_WPM ָ�
2. Ӳ��������
2.1. Ӳ������
S7-1200 PLCĿǰ��3�����͵�CPU��
1��S7-1211C CPU��
2��S7-1212C CPU��
3��S7-1214C CPU��
���������͵�CPU������ʹ��USSͨ��Э��ͨ��ͨ��ģ��CM1241 RS485��ʵ��S7-1200��MM440��Ƶ����ͨ�š�
������ʹ�õ�PLCӲ��Ϊ��
1�� S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
������ʹ�õ�MM440��Ƶ��Ӳ��Ϊ��
1�� MM440 �� 6SE6440 - 2AB11 - 2AA1 ��
2�� MICROMASTER 4 ENCODER MODULE �� 6SE6400 - 0EN00 - 0AA0 ��
3�� SIEMENS MOTOR �� 1LA7060 - 4AB10 - Z ��
4�� USS ͨ�ŵ��� ( 6XV1830 - 0EH10 )
2.2. ����
����ʹ�������ӵ������ͷ��PROFIBUS���¡��� S7-1200 CPU ͨ�ſ���ʹ�������������ͷ��
PROFIBUS ���µĺ�ɫ����B �� RS 485 �ź� +�����ź�Ӧ�����ӵ� MM 440 ͨ�Ŷ˿ڵ� P+����ɫ����A �� RS 485 �ź� -�����ź�Ӧ�����ӵ� MM 440 ͨ�Ŷ˿ڵ� N-��

ͼ1�� MM440���߶��� ��4��MM440���Ӷ���
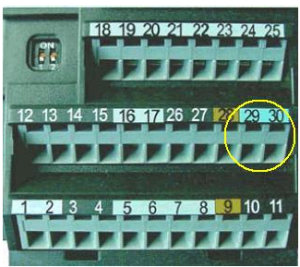
��ΪMM 440 ͨ�ſ��Ƕ������ӣ����� PROFIBUS ���²���Ҫ�����ͷ�����ǰ�����ͷֱ��ѹ�ڶ����ϡ������Ҫ������һ������װ�ã����������µ�ͬɫо�߿���ѹ��ͬһ�������ڡ�PROFIBUS ���µĺ�ɫо��Ӧ��ѹ����� 29����ɫо��Ӧ�����ӵ����� 30����ͼ1����4��ʾ����������ͼ��ͼ2��ʾ��

ͼ2�� S7-1200��MM440����ͼ ���ݳ���������ԭװģ����ģ��
a. ����/�����ӵ�ĸ�ţ���ɿ��Ķ��ӵء������Ӷ����Ƹ�������Ҫ���塣
b. PROFIBUS �����ͷ������ƫ�ú��ն˵��衣
c. MM 440 �˵�ƫ�ú��ն˵��衣
d. ͨ�ſڵĵȵ�λ���ӡ����Ա���ͨ�ſڲ�����ģ��ѹ����ͨ���жϡ�
e. ˫�����ε��£�PROFIBUS�����£����Ǹ���ͨ�ţ����µ����β���˫�˽ӵأ��� PE����
ע�⣬���¼��������������м�Ϊ��Ҫ��Ӱ�졣������������ͨ��������������ⶼ��δ���ǵ����������йأ�
? ƫ�õ��������ڸ��ӵĻ�����ȷ��ͨ�����ϵĵ�ƽ������δ������ʱ�����ȶ����ն˵����������������ϵķ����źš�һ�����Ƶ�������������������˽�ƫ�ú��ն˵��衣
? ͨ�ſ� M �ĵȵ�λ���ӽ��鵥�����ýϴֵĵ��� ������Ҫʹ�� PROFIBUS �����β㣬��Ϊ�������Ͽ����нϴ�ĵ���������ͨ���жϡ�
? PROFIBUS ���µ����β�Ҫ����������� PE��һ��ʵ�õ��������ڿ�����ͷ�����߶��Ӵ�������Ƥ����ѹ������¶�����β�ѹ���� PE �ӵ����ϣ��� PE ĸ�Ż����ýӵص���¶������װ�壩��
? ͨ�����붯���߷ֿ����ߣ����������尲װҲ�ܸ��ƿ���������������װ�õ�����/�����Ҫ���������˲�װ�ã���ʹ�����ε��¡�
? �� MM 440 �İ�װ���ṩ���ն�ƫ�õ���Ԫ��������ʱ�ɰ�˵����ֱ��ѹ�ڶ����ϡ�������ܣ��ɲ��������ܽ���Ԫ�����������ʵ��̶���
3. ��̬
����ͨ��������ʵ�ʲ��������������Step7 Basic V10.5 ����̬S7-1214C ��MM440��Ƶ����USSͨ�š�
3.1. PLC Ӳ����̬
������Step7 Basic V10.5�н���һ����Ŀ����ͼ3��ʾ��

ͼ3�� �½�S7 1200��Ŀ
��Ӳ�������У�����CPU1214C��ͨ��ģ��CM1241 RS485ģ�飬��ͼ4��ʾ��

ͼ4�� S7 1200Ӳ������
��CPU�������У�������̫����IP��ַ������PG��PLC�����ӣ���ͼ5��ʾ��

ͼ5�� S7 1200 IP��ַ������
3.2. MM440��������
���Ǽٶ��Ѿ����������װ�õĻ����������ú͵��ԣ�����������ʶ�ȵȣ�������ֻ�漰�� S7-1200 ������������صIJ�����
MM 440 �IJ�����Ϊ�������ʼ����Ա��ڹ��˲���Ҫ�鿴�IJ��֡� �� S7-1200 ����ʱ����Ҫ���õ���Ҫ�С�����Դ���͡��趨Դ�����������Ҫ���ô����������Ҫ��ר�ҡ��������ʼ��𣬼�������Ҫ�� P0003 ��������Ϊ 3��
����Դ�������ã�
���������������װ�õ�������ֹͣ����/��ת�ȹ��ܡ�����Դ�������þ���������װ�ôӺ���;�����ܿ����źţ����5��ʾ��

��5������Դ�ɲ��� P0700 ����
�˲����з��飬�ڴ˽����һ�飬�� P0700[0]��
�趨Դ���Ʋ�����
�趨ֵ��������װ�õ�ת��/Ƶ�ʵȹ��ܡ��趨Դ��������������װ�ô���������趨ֵ���������������6��ʾ��

��6���趨Դ�ɲ��� P1000 ����
�˲����з��飬�ڴ˽����һ�飬�� P1000[0]��
����Դ���趨Դ֮�����������ϣ����ݹ���Ҫ��������ѡ�á������Կ���Դ���趨Դ������ COM Link �ϵ� USS ͨ��Ϊ������� USS ͨ�ŵIJ������á�
��Ҫ�����У�
1. P0700�� ���� P0700[0] = 5��������Դ���� COM Link �ϵ� USS ͨ�ţ�
2. P1000�� ���� P1000[0] = 5�����趨Դ���� COM Link �ϵ� USS ͨ�ţ�
3. P2009�� �����Ƿ�� COM Link �ϵ� USS ͨ���趨ֵ������趨ֵ������תƵ�ʵİٷֱ���ʽ�����Ǿ���Ƶ��ֵ��Ϊ0������� USS ͨ���趨ֵ�����趨ΪMM440�е�Ƶ���趨��Χ�İٷֱ���ʽ��Ϊ1���� USS ͨ���趨ֵ���й�����趨ֵΪ���Ե�Ƶ����ֵ��
4. P2010�� ���� COM Link �ϵ� USS ͨ�����ʡ����� S7-1200 ͨ�ſڵ����ƣ�֧�ֵ�ͨ�Ų��������7��ʾ��
| 4 | 2400 bit/s |
| 5 | 4800 bit/s |
| 6 | 9600 bit/s |
| 7 | 19200 bit/s |
| 8 | 38400 bit/s |
| 9 | 57600 bit/s |
| 12 | 115200 bit/s |
��7��ͨ�Ų�����
5. P2011�� ���� P2011[0] = 0 �� 31��������װ�� COM Link �ϵ� USS ͨ�ſ��������ϵĴ�վ��ַ��
6. P2012�� ���� P2012[0] = 2���� USS PZD ������Ϊ 2 ���ֳ���
7. P2013�� ���� P2013[0] = 4��
8. P2014�� ���� P2014[0] = 0 �� 65535���� COM Link �ϵ� USS ͨ�ſ����ź��жϳ�ʱʱ�䣬��λΪ ms��������Ϊ 0�����д˶˿��ϵij�ʱ��飻
9. P0971�� ���� P0971 = 1������������������MM 440 �� EEPROM ��
4. USSͨ��ԭ�����̵�ʵ��
4.1 S7 1200 PLC��MM440 ͨ��USSͨ�ŵĻ���ԭ��
S7 1200�ṩ��ר�õ�USS�����USSͨ�ţ���ͼ6��ʾ��

ͼ6��S7 1200 ר�õ�USS��
USS_DRV���ܿ�ͨ��USS_DRV_DB���ݿ�ʵ����USS_PORT���ܿ�����ݽ����봫�ͣ���USS_PORT���ܿ���S7-1200 PLC CM1241 RS485ģ����MM440֮���ͨ�Žӿڡ�USS_RPM���ܿ��USS_WPM���ܿ���MM440��ͨ����USS_DRV���ܿ��ͨ�ŷ�ʽ����ͬ�ġ���ͼ7��ʾ��

ͼ7��ͨ�Žṹͼ
4.2. ���ܿ�ʹ�ý���
USS_DRV ���ܿ���S7-1200 USSͨ�ŵ����幦�ܿ飬����MM440����Ϣ�Ϳ���MM440��ָ���ͨ��������ܿ�����ɵġ��������� OB�е��á�
USS_PORT���ܿ���S7-1200��MM440����USSͨ�ŵĽӿڣ���Ҫ����ͨ�ŵĽӿڲ�����������OB���ж�OB�е��á�
USS_RPM���ܿ���ͨ��USSͨ�Ŷ�ȡMM440�IJ������������� OB�е��á�
USS_WPM���ܿ���ͨ��USSͨ������MM440�IJ������������� OB�е��á�
4.3. S7 1200 PLC����USSͨ�ŵı��
4.3.1. USS_DRV���ܿ�ı��
USS_DRV���ܿ�ı����ͼ8��ʾ��

ͼ8�� USS_DRV���ܿ�ı��
USS_DRV���ܿ�������MM440���н������ݣ��Ӷ���ȡMM440��״̬�Լ�����MM440�����С�ÿ��MM440ʹ��Ψһ��һ��USS_DRV���ܿ飬����ͬһ��CM1241 RS485ģ���USS���������MM440�����16������ʹ��ͬһ��USS_DRV_DB��
| USS_DRV_DB�� ָ��MM440����USSͨ�ŵ����ݿ顣 | |||||
| RUN�� ָ��DB���MM440����ָ� | |||||
| OFF2�� ����ֹͣ������ͣ���� ��λΪ0ʱͣ���� | |||||
| OFF3�� ����ͣ�������ƶ�ͣ������λΪ0ʱͣ���� | |||||
| F_ACK�� MM440����ȷ�ϡ� | |||||
| DIR �� MM440���Ƶ����ת�� | |||||
| SPEED_SP�� MM440���ٶ��趨ֵ�� | |||||
| NDR�� �����ݾ����� | |||||
| ERROR�� ����������� | |||||
| RUN_EN�� MM440����״ָ̬ʾ�� | |||||
| D_DIR�� MM440���з���״ָ̬ʾ�� | |||||
| INHIBIT�� MM440�Ƿ�ֹ��״ָ̬ʾ�� | |||||
| FAULT�� MM440���ϡ� | |||||
| SPEED�� MM440�ķ�����ʵ���ٶ�ֵ�� | |||||
| DRIVE�� MM440��USSվ��ַ��MM440����P2011���á� | |||||
| PZD_LEN�� PZD���ݵ���������Чֵ2��4��6��8���֡�MM440����P2012���á� | |||||
4.3.2. USSͨ�Žӿڲ������ܿ�ı��
USSͨ�Žӿڲ������ܿ�ı����ͼ9��ʾ��

ͼ9�� USSͨ�Žӿڲ������ܿ�ı��
USS_PORT���ܿ���������USS�����ϵ�ͨ�ţ�����S71200 CPU��MM440��ͨ�Žӿڡ�ÿ��CM1241 RS485ģ�����ұ�����һ��USS_PORT���ܿ顣
PORT�� ͨ��ģ���ʶ������Ĭ�ϱ������ġ�������(Constants) ѡ������õij�����
BAUD�� ָ���Ǻ�MM440����ͨ�е����ʡ� MM440�IJ���P2010�ֽ������á�
USS_DB�� �������û������з��� USS_DRV ָ��ʱ�����ͳ�ʼ���ı������ݿ顣
ERROR�� �������
STATUS��ɨ����ʼ����״̬��
USS_PORT ����ͨ�����ݳ���������ԭװģ����ģ��RS485ͨ��ģ�鴦�� CPU �ͱ�Ƶ��֮���ʵ��ͨ�š� ÿ�ε��ô˹��ܿɴ�����һ����Ƶ����һ��ͨ�š� �û�������뾡����ô˹����Է�ֹ���Ƶ��ͨ�ų�ʱ�� ������ OB ���κ��ж� OB �е��ô˹��ܡ�ͨ����ѭ���ж� OB ����USS_PORT �Է�ֹ��Ƶ����ʱ�Լ�ʹ USS_DRV ���õ� USS ���ݱ������¡�
S7-1200 PLC��MM440��ͨ��������������ɨ�����ڲ�ͬ���ģ������һ����MM440��ͨ���¼�֮ǰ��S7-1200ͨ������˶��ɨ�衣
USS_PORTͨ�ŵ�ʱ������S7-1200��MM440ͨ������Ҫ��ʱ�䣬��ͬ��ͨ�Ų����ʶ�Ӧ�IJ�ͬ��USS_PORTͨ�ż��ʱ�䡣��8�г��˲�ͬ�IJ����ʶ�Ӧ��USS_PORT��Сͨ�ż��ʱ�䡣

��8����ͬ�IJ����ʶ�Ӧ��USS_PORT��Сͨ�ż��ʱ��
USS_PORT�ڷ���ͨ�Ŵ���ʱ��ͨ������3�γ��������ͨ���¼�����ôS7-1200��MM440ͨ�ŵ�ʱ�����USS_PORT����ͨ�ų�ʱ��ʱ���������磺���ͨ�Ų�������9600����ôUSS_PORT��MM440ͨ�ŵ�ʱ����Ӧ��������С�ĵ���ʱ������������116.3�����С��349���롣S7-1200 USS Э���Ĭ�ϵ�ͨ�Ŵ���ʱ���Դ�����2�Ρ�
�������ϵ�USS_PORTͨ��ʱ��Ĵ�����������ѭ���ж�OB���е���USS_PORTͨ�Ź��ܿ顣�ڽ���ѭ���ж�OB��ʱ�����ǿ�������ѭ���ж�OB���ɨ��ʱ�䣬������ͨ�ŵ�Ҫ��ѭ���ж�OB���ɨ��ʱ���������ͼ10��ʾ��

ͼ10��ѭ���ж�OB���ɨ��ʱ�������
4.3.3. USS_RPM���ܿ�ı��
USS_RPM���ܿ�ı�� ��ͼ11��ʾ��

ͼ11��USS_RPM���ܿ�ı��
USS_RPM���ܿ�����ͨ��USSͨ�Ŵ�MM440��ȡ������
| REQ�� ��ȡ�������� | |||
| DRIVE�� MM440��USSվ��ַ�� | |||
| PARAM�� MM440�IJ������롣 | |||
| INDEX�� MM440�IJ����������� | |||
| USS_DB��ָ��MM440����USSͨ�ŵ����ݿ顣 | |||
| DONE�� ��ȡ������ɡ� | |||
| ERROR�� ��ȡ�������� | |||
| STATUS����ȡ����״̬���롣 | |||
| VALUE�� ����ȡ�IJ�����ֵ�� | |||
ע�⣺���ж�ȡ�������ܿ���ʱ���������ݵ���������һ��Ҫ��ȷ��Ӧ��
4.3.4. USS_WPM���ܿ�ı��
USS_WPM���ܿ�ı����ͼ12��ʾ��

ͼ12��USS_WPM���ܿ�ı��
USS_WPM���ܿ�����ͨ��USSͨ������MM440�IJ�����
| REQ�� ������� | |||
| DRIVE�� MM440��USSվ��ַ�� | |||
| PARAM�� MM440�IJ������롣 | |||
| INDEX�� MM440�IJ����������롣 | |||
| EEPROM���Ѳ����洢��MM440��EEPROM�� | |||
| VALUE�� ���ò�����ֵ�� | |||
| USS_DB��ָ��MM440����USSͨ�ŵ����ݿ顣 | |||
| DONE�� ��ȡ������ɡ� | |||
| ERROR�� ��ȡ��������״̬�� | |||
ע�⣺��д��������ܿ���ʱ���������ݵ���������һ��Ҫ��ȷ��Ӧ��
4.3.5. ��������
�����дͬʱʹ�ܣ���818A����������ͨ�����ڱ�����Ƶ������һ����ռ�á���ͼ13��ʾ��

ͼ13����дͬʱʹ�ܱ���
���ͨ�ŶϿ�����PORT����818B����ͼ14��ʾ��

ͼ14��ͨ�ŶϿ�����
����ٶ��趨ֵ����ȷ����8186����ͼ15��ʾ��

ͼ15���ٶ��趨ֵ����
�ؼ��� ���ݳ���������ԭװģ����ģ��
USS Э�飬
SINAMICS V90�ŷ������� SIMOTICS S-1FL6 �ŷ��������������Ż�������ʹ�õ��ŷ�����ϵͳ�������������ͣ����ֲ�ͬ�ĵ����߹���ʷ�Χ��0.05kW��7.0kW�Լ����������Ĺ���ϵͳʹ����Թ㷺���ڸ��и�ҵ���磺��λ�����ͣ��շž����豸�У�ͬʱ���ŷ�ϵͳ������S7-1500T/S7-1500/S7-1200 ����������ϣ�ʵ�ַḻ��������/���ֵ��˶����ƹ��ܣ�Ӧ���ں��С������豸�С�

�Ƚ���һ���Ż����Զ�ʵʱ�Ż�����ʹ�豸��ø��ߵĶ�̬����
�Զ����ƻ�ег��Ƶ��
1 MHz �ĸ�����������
20 λ�ֱ��ʵĶ�Ȧ����ֵ������
�������п���ģʽ���ⲿ����λ�ÿ��ơ��ڲ��趨ֵλ�ÿ��ƣ�ͨ������ Modbus��PROFINET�����ٶȿ��ƺ�Ť�ؿ���
�����ڲ��趨ֵλ�ÿ��ƹ���
ȫ�����������������ƶ�����
���ɱ�բ�̵�����400V �ͣ��������ⲿ�̵���
������ PTI, PROFINET, USS, Modbus RTU������λ�ӿڷ�ʽ
�����ϵͳ�����ӿ�ݼ�
������һվʽ�ṩ�������
���ٱ�ݵ��ŷ��Ż��ͻ�е�Ż�
�����õ� SINAMICS V-ASSISTANT ���Թ���
ͨ�� SD ����������
�����ĵ�ѹ��Χ��200 V ... 240 V �C15% / +10% (230V ��) �� 380 V ... 480 V �C15% / +10% (400V ��)
��Ʒ�ʵĵ�����
��������ȼ� IP 65����˱����ͷ�
���ɰ�ȫŤ��ֹͣ��STO������
���������ɿ����

|
�������� |
|
|---|---|
|
���*: |
20 mm, 30 mm, 40 mm, 50 mm |
|
�Ť��: |
0.16 Nm �� 6.37 Nm |
|
�/����ٶ�: |
3000 rpm / 5000 rpm |
|
������: |
����ʽ TTL 2500 S/R (13 λ) |
|
�����ȼ�: |
IP65 |
|
ѡ��: |
��բ |
|
������: |
�����ƽ�� |

|
�������� |
|
|---|---|
|
���*: |
45 mm, 65 mm, 90mm |
|
�Ť��: |
1.27 Nm �� 33.40 Nm |
|
�/����ٶ�: |
2000 rpm / 3000 rpm |
|
������: |
����ʽ������ TTL 2500 S/R (13 λ �ֱ���) |
|
�����ȼ�: |
IP65 |
|
ѡ��: |
��բ |
|
������: |
�����ƽ�� |

|
�������� |
|
|---|---|
|
���ʷ�Χ: |
1AC 0.05 kW �� 0.75 kW |
|
��ѹ: |
1AC 200 V��240 V (-15 % / +10 %) |
|
����ģʽ |
�ⲿ����λ�ÿ��ƣ�PTI�棩���ڲ��趨ֵλ�ÿ��ơ��ٶȿ��ơ�Ť�ؿ��� |
|
�����ȼ�: |
IP20 |
















